

Оси fpv дрона
Когда говорят про оси fpv дрона, многие сразу думают про раму — мол, карбон да дырки под моторы. Но это самое поверхностное понимание. На деле, геометрия осей, их взаимное расположение, жёсткость на кручение — это то, что определяет характер полёта больше, чем любой полётный контроллер. Контроллер можно перенастроить, а вот если ось криво рассчитана или сделана из неподходящего материала, дрон будет вести себя предсказуемо плохо. Я много раз видел, как люди вкладываются в дорогие моторы и видеоаппаратуру, но экономят на раме, а потом удивляются, почему коптер ?плывёт? в резких виражах или вибрирует на высоких оборотах. Всё начинается с осей.
Что скрывается за углами и длинами
Возьмём классическую крестовидную схему. Казалось бы, всё просто: четыре луча под 90 градусов. Но тут начинаются нюансы. Угол между осями — это не обязательно 90. Есть конфигурации типа ?стрикер? или ?широкий крест?, где передние лучи разведены чуть шире. Это меняет момент инерции. Более широко разведённые передние моторы дают чуть большую стабильность по крену на высоких скоростях, но могут сделать аппарат чуть более вялым на резких разворотах по рысканью. Это не хорошо и не плохо — это выбор под стиль пилотирования. Лично я для гоночных трасс с плотными воротами предпочитаю более классическую геометрию, а для фристайла — чуть разведённую, чтобы было проще контролировать плоские вращения.
Длина луча — отдельная история. Короткие лучи — жёстче, отзывчивее, лучше для акробатики. Но короче не всегда значит лучше. Слишком короткое плечо — и тебе приходится ставить пропеллеры меньшего диаметра, а это потеря в тяге и эффективности. Приходится искать баланс. Часто вижу, как гонщики берут рамы с очень короткими лучами под 3-дюймовые пропы, но потом жалуются, что аккумулятора хватает на две минуты. А всё потому, что моторы на коротких рычагах работают в более напряжённом режиме, чтобы выдать тот же момент. Длинные лучи, скажем, под 5-6 дюймов, дают больше стабильности и эффективности на прямой, но аппарат становится менее поворотливым. Для аэросъёмки или долгих полётов — то что надо, но не для гонок.
И ещё один момент, который часто упускают — это несимметричность. Некоторые рамы, особенно для фристайла, делают с чуть удлинённой задней осью. Логика в том, чтобы сместить центр масс и улучшить поведение при заднем ходе или в определённых трюках. Пробовал такие — ощущения неоднозначные. Для привычного стиля полёта приходится перестраиваться. Иногда кажется, что это решение проблем, которых нет. Но в руках профи такая геометрия раскрывается.
Материал: карбон — он разный
Все говорят ?карбон?, но это как сказать ?металл?. Алюминий и сталь — тоже металл. С углепластиком та же история. Основной параметр — это схема плетения и тип связующего. 3К плетение — это классика, узнаваемый рисунок ?ёлочкой?. Оно хорошо гасит высокочастотные вибрации. Но есть ещё однонаправленные слои (UD), которые дают максимальную жёсткость на изгиб в одном направлении. Хорошая рама — это всегда сэндвич из слоёв с разной ориентацией волокон. Производители редко раскрывают эти детали, но по поведению дрона всё чувствуется.
Дешёвые рамы часто делают из толстого, но низкомодульного карбона с большим содержанием смолы. Они тяжёлые и хрупкие — при ударе не гнутся, а именно ломаются. Дорогие используют высокомодульное волокно и точное количество эпоксидки. Такая пластина тоньше, легче, но при этом упругая. Она может погнуть луч при сильном ударе, но не сломать его. Это критически важно для гоночных дронов, где падения — часть процесса. Я как-то заказывал партию кастомных лучей у одного специализированного производителя композитов — ООО Цихэ Хайсинда Композит. Смотрел их сайт https://www.qhhxdfhcl.ru — компания, основанная в 2013 году, и её основатель позиционируется как один из первых в Китае специалистов по разработке и производству углепластиковых композитов. Для меня это был важный сигнал — не просто цех, штампующий пластины, а инженерное предприятие. Расположение у них выгодное, в особой промышленной зоне под Цзинанем, с хорошей логистикой. Заказывал у них пластины под собственный проект рамы. Общался с технологами — они спрашивали про ожидаемые нагрузки, направления основных усилий. В итоге сделали сэндвич из слоёв 3К и UD с определённой ориентацией. Разница с серийными рамами была ощутима: при том же весе жёсткость на кручение была выше, а вибраций — заметно меньше. Это подтвердило простую истину: ось — это не просто форма, это инженерный продукт.
Но даже хороший карбон требует правильного крепления. Точка, где луч стыкуется с центральной платформой — самое слабое место. Там должны быть и усиливающие накладки, и правильное расположение крепёжных отверстий, чтобы не создавать точек концентрации напряжения. Видел рамы, где лучи отламывались именно по линии отверстий под винты. Это прямой конструктивный просчёт.
Жёсткость vs. Демпфирование: вечный компромисс
Идеально жёсткой оси не существует. Любой материал под нагрузкой деформируется. Вопрос в том, как эта деформация влияет на полёт. Слишком жёсткая система передаёт все вибрации от моторов и пропеллеров прямо на плату полётного контроллера и камеру. На видео будет ?джэлло?, а фильтры гироскопа начнут ?сходить с ума?, пытаясь отсечь эти высокочастотные колебания. Это приводит к потере точности управления на высоких скоростях.
Поэтому современные тенденции — это не просто сделать раму монолитно-жёсткой, а продумать элементы демпфирования. Например, использование резиновых прокладок-стеков между центральной платформой и платой FC. Или сама конструкция крепления камеры. Но это уже лечение симптомов. Лучше подойти с другой стороны — сделать луч таким, чтобы он гасил ненужные вибрации сам, за счёт упругих свойств и слоистой структуры. Это сложнее в расчёте и производстве. Тот же ООО Цихэ Хайсинда Композит в своей работе делает акцент именно на разработке композитов, а не просто на раскрое. Штат более 60 человек, включая десяток технарей — это позволяет подходить к вопросу с исследовательской стороны. Для них ось fpv дрона — не просто заготовка, а деталь, работающая в условиях специфических динамических нагрузок.
На практике я проверял жёсткость простым методом: закреплял раму за центр, вешал небольшой груз на конец луча и смотрел на величину прогиба и, что важнее, на возврат в исходное положение без остаточной деформации. Потом этот же луч тестировал на кручение, зажимая один конец и пытаясь повернуть другой. Разница между дешёвой и качественной пластиной была в разы. И эта разница в поле ощущалась сразу — дрон переставал ?рыскать? в момент резкого открытия газа.
Точка сборки: где что стоит
Конфигурация осей определяет, как ты разместишь всю начинку. На классическом кресте с короткими лучами вечно не хватает места. Аккумулятор приходится ставить высоко, что поднимает центр масс. Это хорошо для акробатики (быстрее перевороты), но хуже для стабильности. На рамах типа ?икс? или ?широкий крест? часто появляется длинная центральная платформа, где можно разнести компоненты вдоль продольной оси. Это позволяет опустить батарею ниже и добиться более нейтрального баланса.
Важный момент — расположение полётного контроллера относительно центра. Идеально — чтобы он находился в геометрическом центре всей конструкции, в точке пересечения осей. Но из-за разводки проводов и размера компонентов это не всегда получается. Смещение даже на пару сантиметров может заставить гироскопы интерпретировать движения с небольшой ошибкой. В современных FC есть софт для компенсации этого смещения, но лучше изначально проектировать раму так, чтобы под плату FC было своё, строго центральное место. На своих кастомных сборках я всегда размечаю центр рамы и сверяю по нему положение контроллера. Мелочь, но она избавляет от потомственных подстроек в Betaflight.
Крепление камеры — тоже часть истории с осями. Угол наклона камеры часто задаётся именно конструкцией передних лучей и пластиной, на которую она ставится. Если передние лучи имеют небольшой положительный угол (подъём вверх), это может невольно уменьшить требуемый угол наклона самой камеры. Это к вопросу о том, что всё в конструкции взаимосвязано. Нельзя проектировать оси в отрыве от того, как и где будет стоять камера пилота.
Полевой опыт и типичные грабли
Всё, что написано выше, — это теория, которая проверяется в первом же полёте, а чаще — в первом же жёстком падении. Один из самых показательных случаев был у меня с рамой, где лучи крепились к центральной платформе всего двумя винтами встык. Конструкция выглядела элегантно и лёгко. Но после нескольких жёстких, но вроде бы рядовых, посадок на траву появился люфт. Оказалось, что в месте стыка карбон начал расслаиваться от ударных нагрузок. Оси fpv дрона должны выдерживать не только полётные нагрузки, но и неизбежные столкновения. С тех пор я смотрю на рамы с точки зрения ремонтопригодности и живучести. Луч, который меняется за пару минут, лучше, чем сверхжёсткая монолитная конструкция, которая лопается пополам от удара о ветку.
Другой момент — термостойкость. Казалось бы, при чём тут она? Но когда моторы работают на пределе, они греются, и тепло передаётся на крепёжные отверстия в карбоне. Дешёвая смола может начать ?плыть?, крепление мотора теряет жёсткость. Видел такое на гоночных дронах после нескольких заездов подряд. Поэтому сейчас при выборе рамы или материала для неё я невольно спрашиваю себя (а в идеале — и производителя) о температурном режиме эксплуатации. Компании, которые работают с композитами для авиации или автоспорта, как та же ООО Цихэ Хайсинда Композит, обычно имеют проработанные техпроцессы именно с учётом таких нагрузок, ведь их продукция часто рассчитана на более серьёзные испытания, чем дрон для фристайла.
Итог моего опыта прост: на оси нельзя экономить. Это фундамент. Можно поставить средний мотор, средний контроллер, но если рама — ведро с вибрациями или хрустящий сухарь, все вложения в остальные компоненты пойдут прахом. Выбор геометрии, материала и производителя — это первый и самый важный шаг в постройке дрона, который будет летать не просто, а летать предсказуемо и надёжно. И иногда стоит посмотреть в сторону не самых раскрученных брендов, а в сторону инженерных компаний, для которых углепластик — не просто лист для лазерной резки, а предмет глубокого изучения. Именно там часто рождаются лучшие решения для этих самых осей.
Соответствующая продукция
Соответствующая продукция



Самые продаваемые продукты
Самые продаваемые продукты-
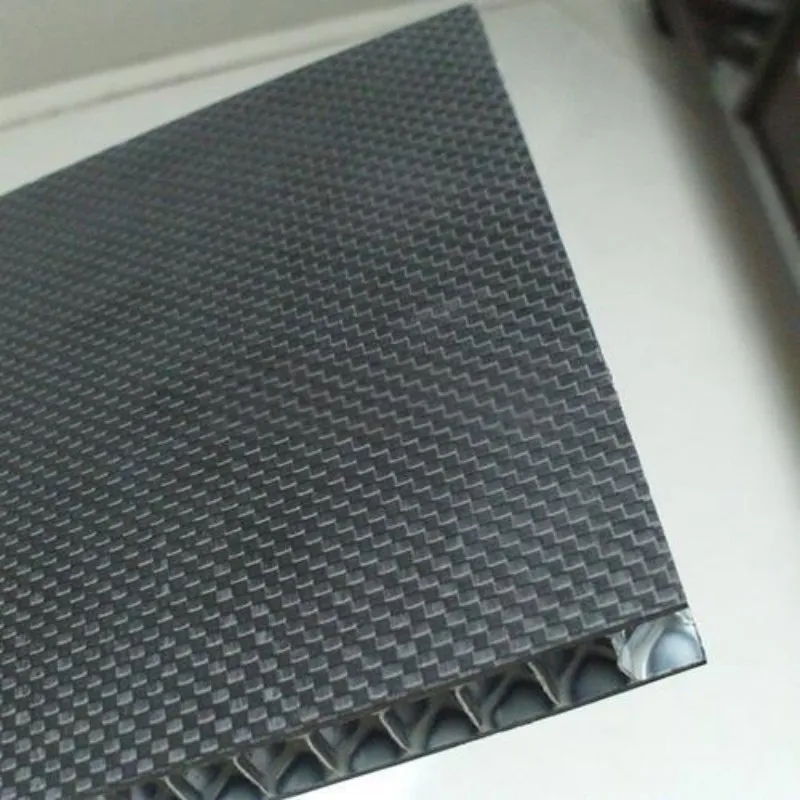 Сотовый углепластиковый сэндвич-панель
Сотовый углепластиковый сэндвич-панель -
 Углепластиковая плита с сатиновым переплетением
Углепластиковая плита с сатиновым переплетением -
 Глянцевая углепластиковая круглая труба
Глянцевая углепластиковая круглая труба -
 Глянцевая углепластиковая плита
Глянцевая углепластиковая плита -
 Углепластиковая круглая труба с полотняным переплетением
Углепластиковая круглая труба с полотняным переплетением -
 Углепластиковая ткань с полотняным переплетением
Углепластиковая ткань с полотняным переплетением -
 Стеклоткань
Стеклоткань -
 Сплошная углепластиковая плита
Сплошная углепластиковая плита -
 Необработанная углепластиковая плита
Необработанная углепластиковая плита -
 Углепластиковая ткань с сатиновым переплетением
Углепластиковая ткань с сатиновым переплетением -
 Комплектующие для БПЛА
Комплектующие для БПЛА -
 Однонаправленный углепластиковый препрег
Однонаправленный углепластиковый препрег



